Schneider Electric to showcase the latest predictive maintenance innovations at Hornbill seminar for Plant Asset Life Management (PALM) 2019
The new Easergy P3 and P5 protection relays will be on show at the Cardiff City Stadium this October,…

The new Easergy P3 and P5 protection relays will be on show at the Cardiff City Stadium this October,…

As automation in the Manufacturing sector boosts production, staff are embracing the benefits – with more independence and efficiency…

Since the launch of the drylin delta robot last year, igus gives machine builders the option to buy it…

Eataly and FPT Industrial – the Brand of CNH Industrial dedicated to the development, production and sale of powertrains…

~ Advances in mobile robotics ~ Automated guided vehicles (AGVs) have been an industry staple since 1953. However, their reliance…
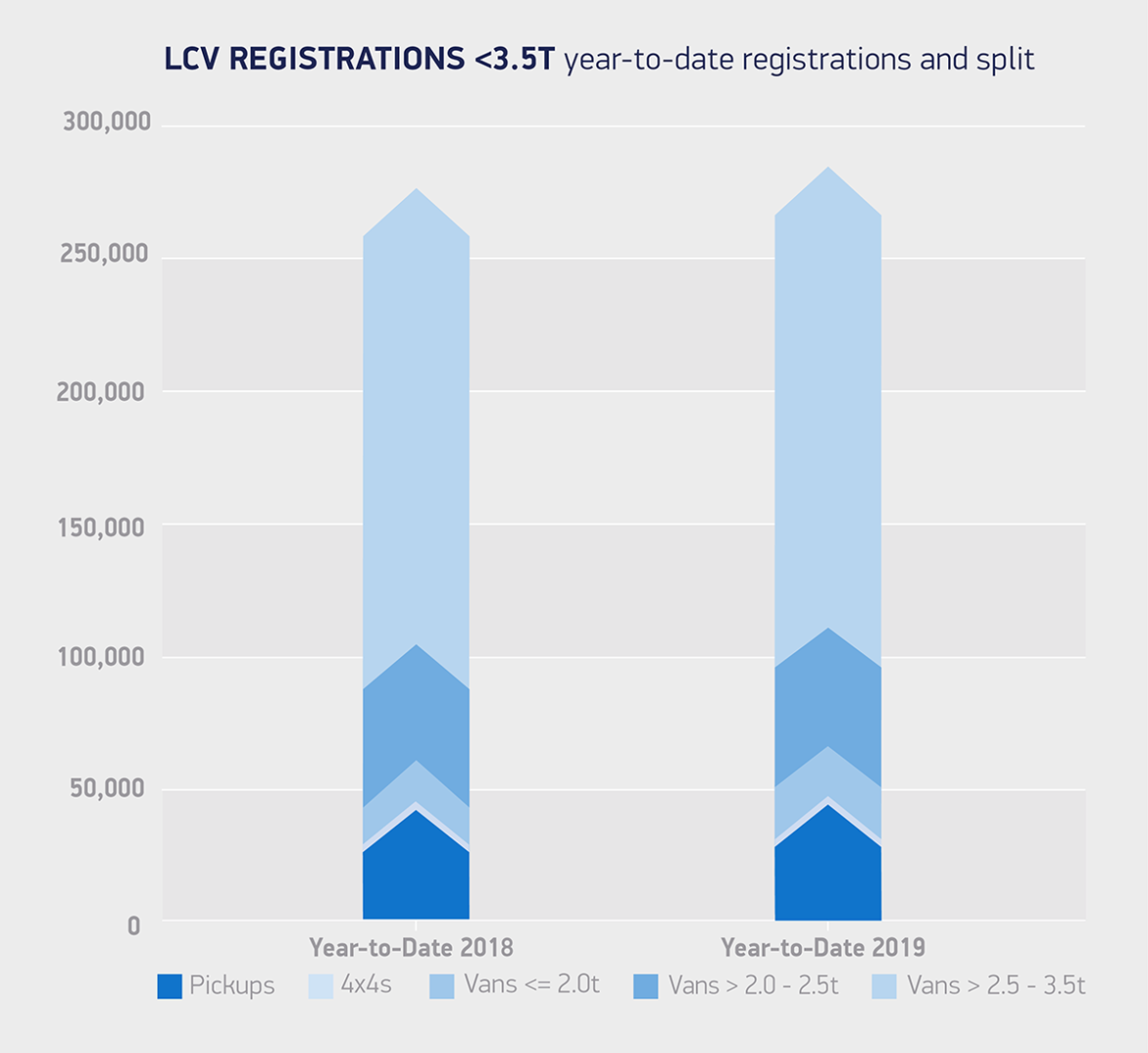
UK new van market falls -23.5% in September as regulatory changes and economic uncertainty impact performance. Registrations of…

Sheffield, UK; 3rd October, 2019: As is tradition, Formnext — the Additive Manufacturing (AM) industry’s premier event of the…
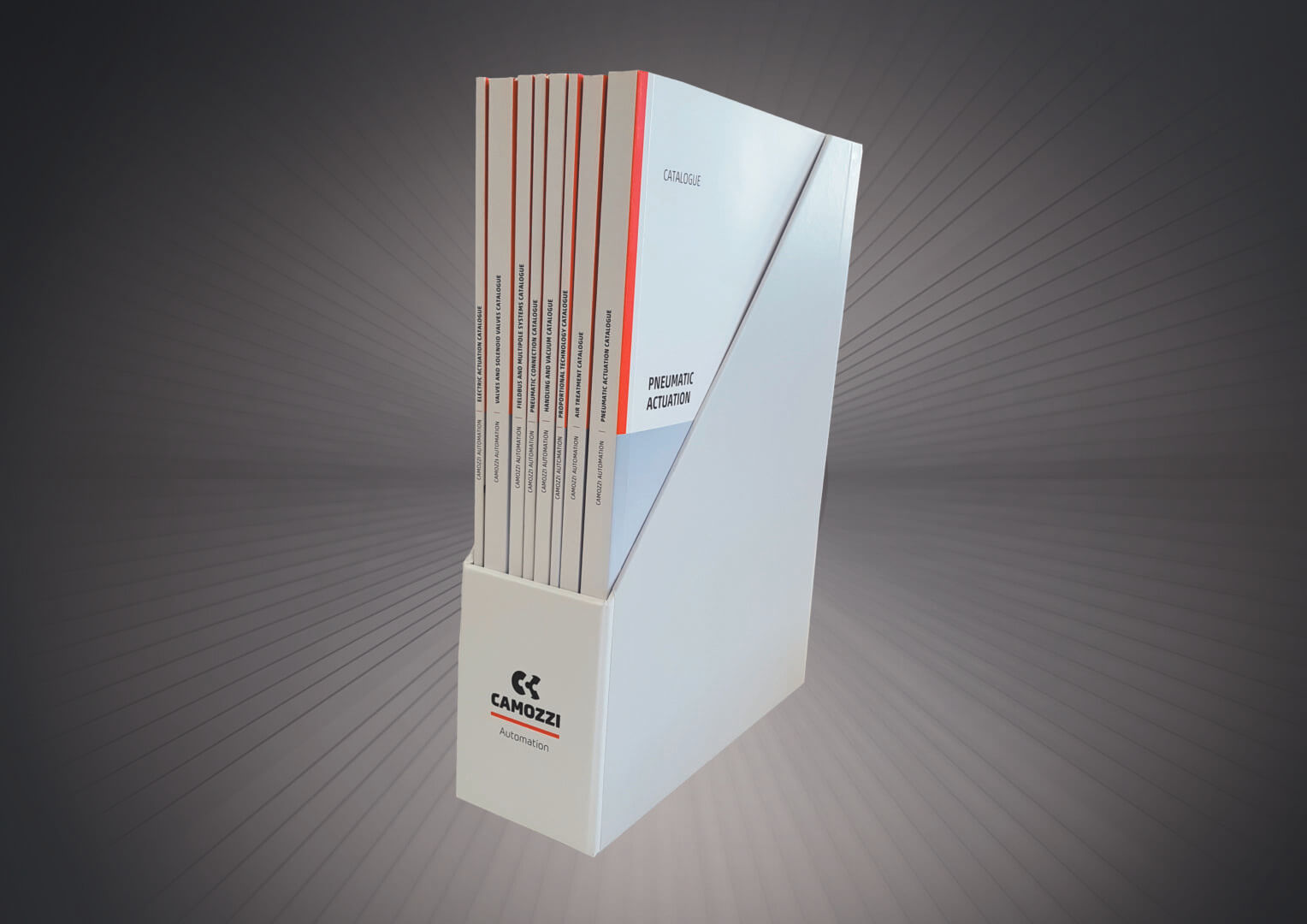
Nuneaton, 4 October 2019 – Camozzi Automation has re-launched its Technical Catalogue in a brand-new format; producing 8 individual,…
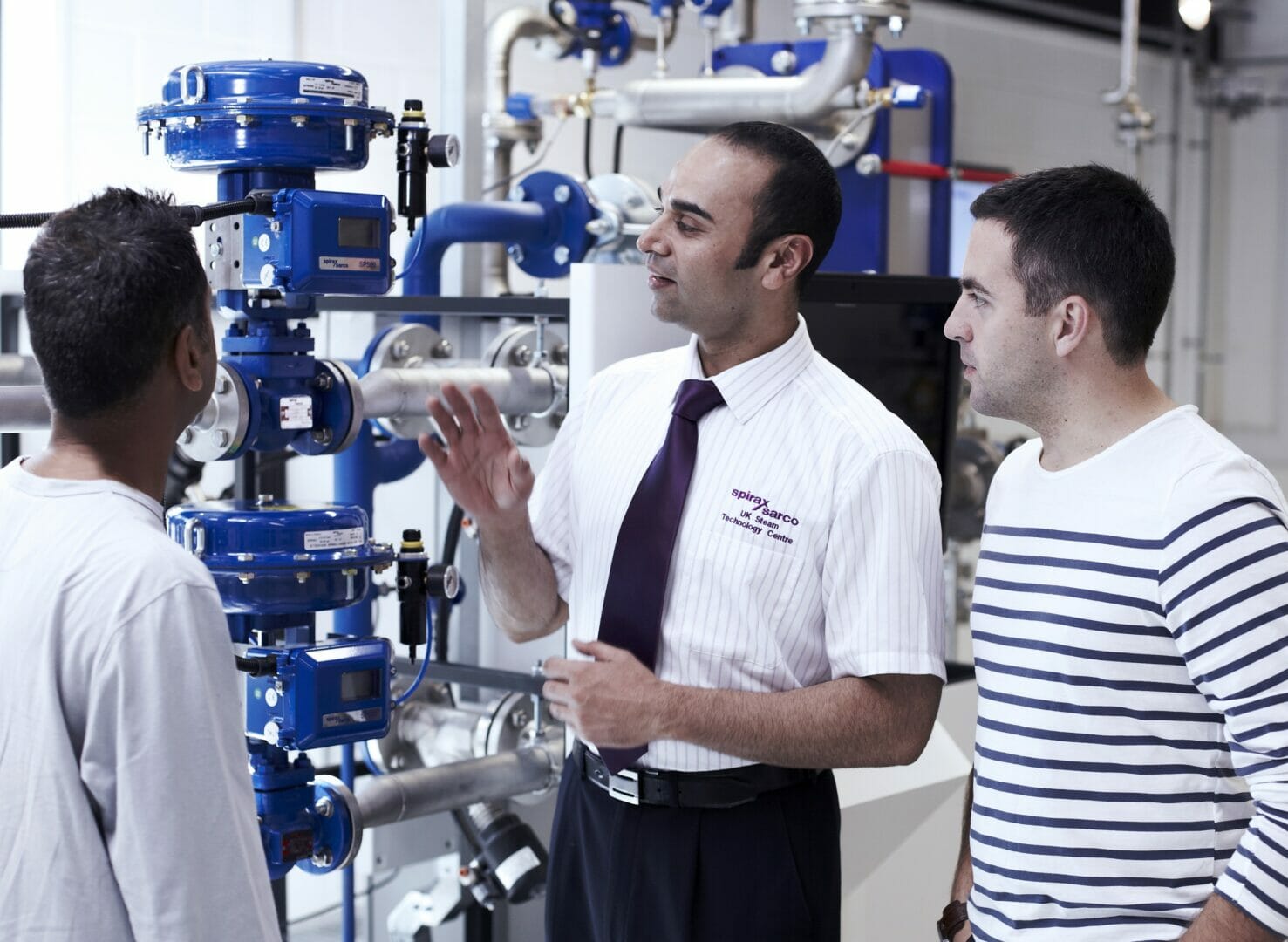
Leading steam solutions provider, Spirax Sarco, is celebrating three decades of course-accreditation from City & Guilds Group.
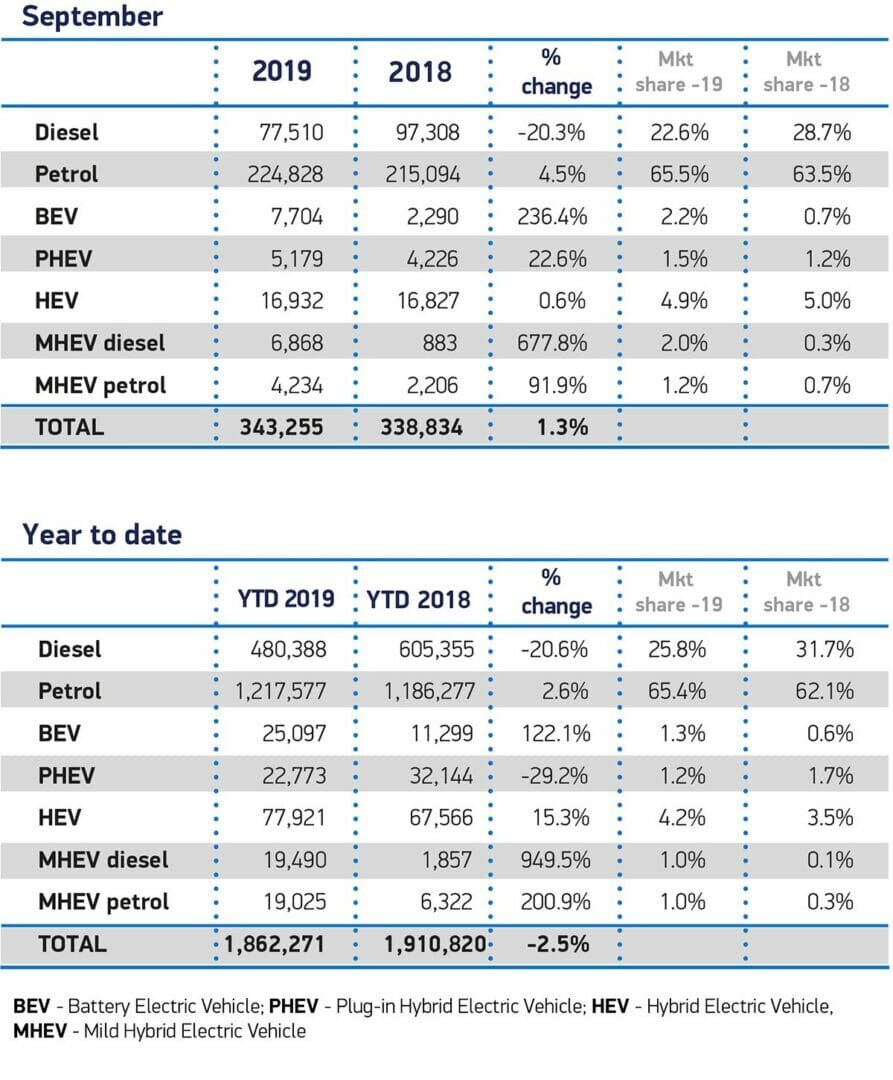
UK new car market declines in first nine months of 2019, as Brexit uncertainty stifles consumer confidence. September…

Lifting equipment manufacturer and service provider, Konecranes UK, has been awarded the RoSPA Gold Award for health and safety….

Filtermist International Limited has restructured its UK business operations to ensure it delivers a single-source solution for customers looking…
